Up to 70 % more efficient mowing
Up to 65 % lower operator costs
Level 3 – Extended Autonomy
At this level, machines achieve near full autonomy and operate independently, adjusting to terrain and obstacles in open environments without prior preparation. With advanced sensors, AI-driven algorithms, and real-time data processing, the system can navigate complex landscapes, avoid hazards, and complete tasks efficiently without human intervention.
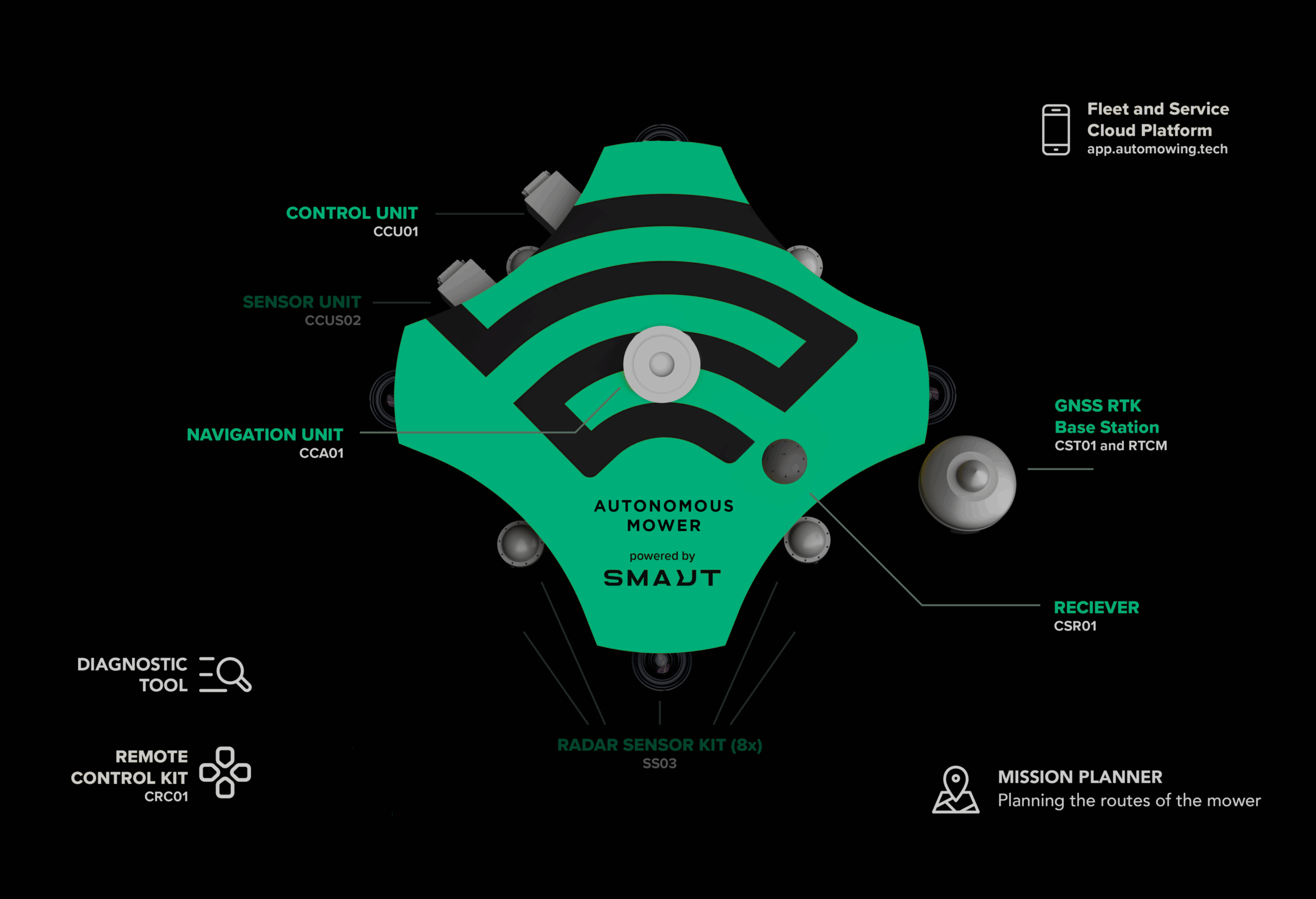
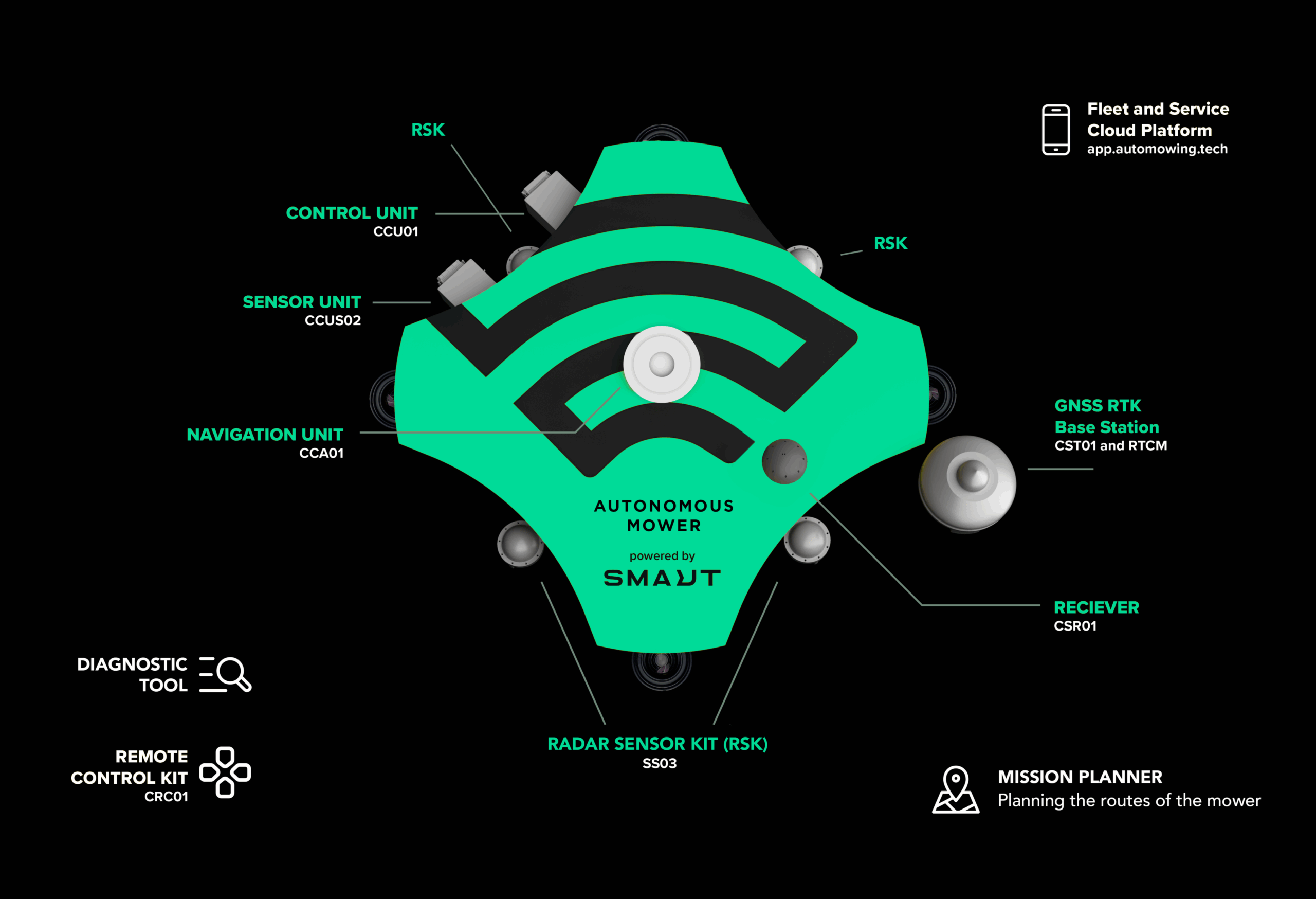
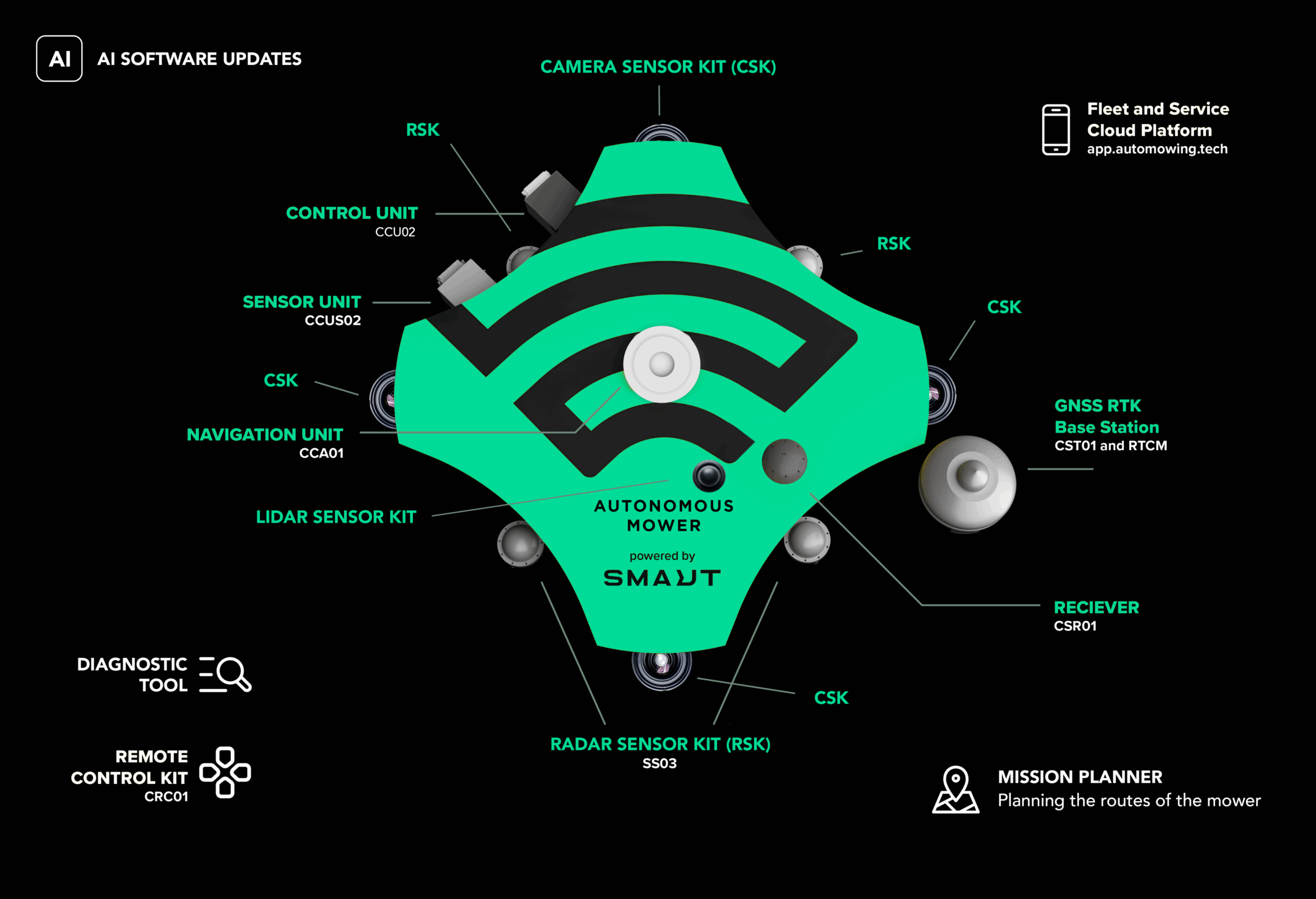
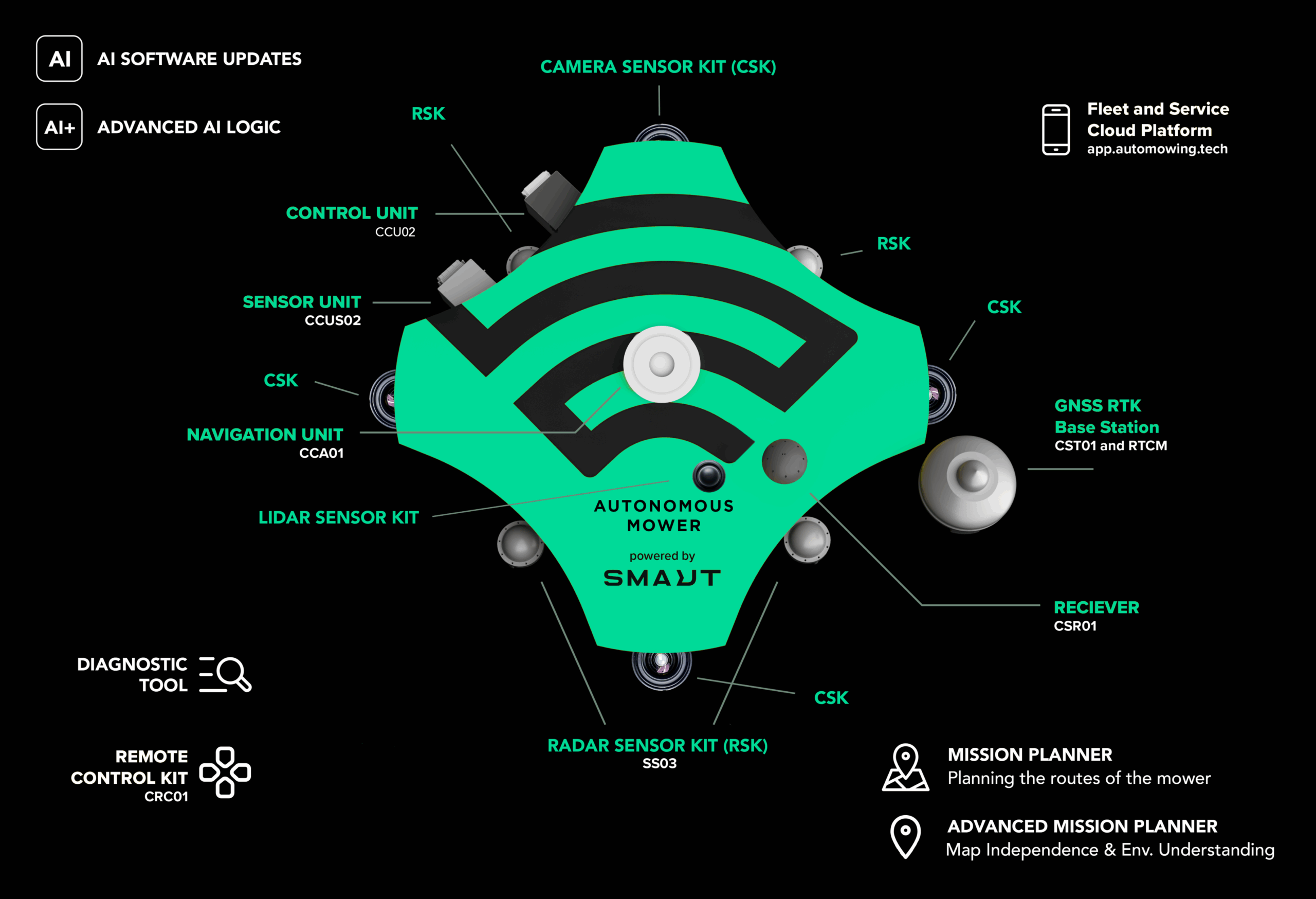
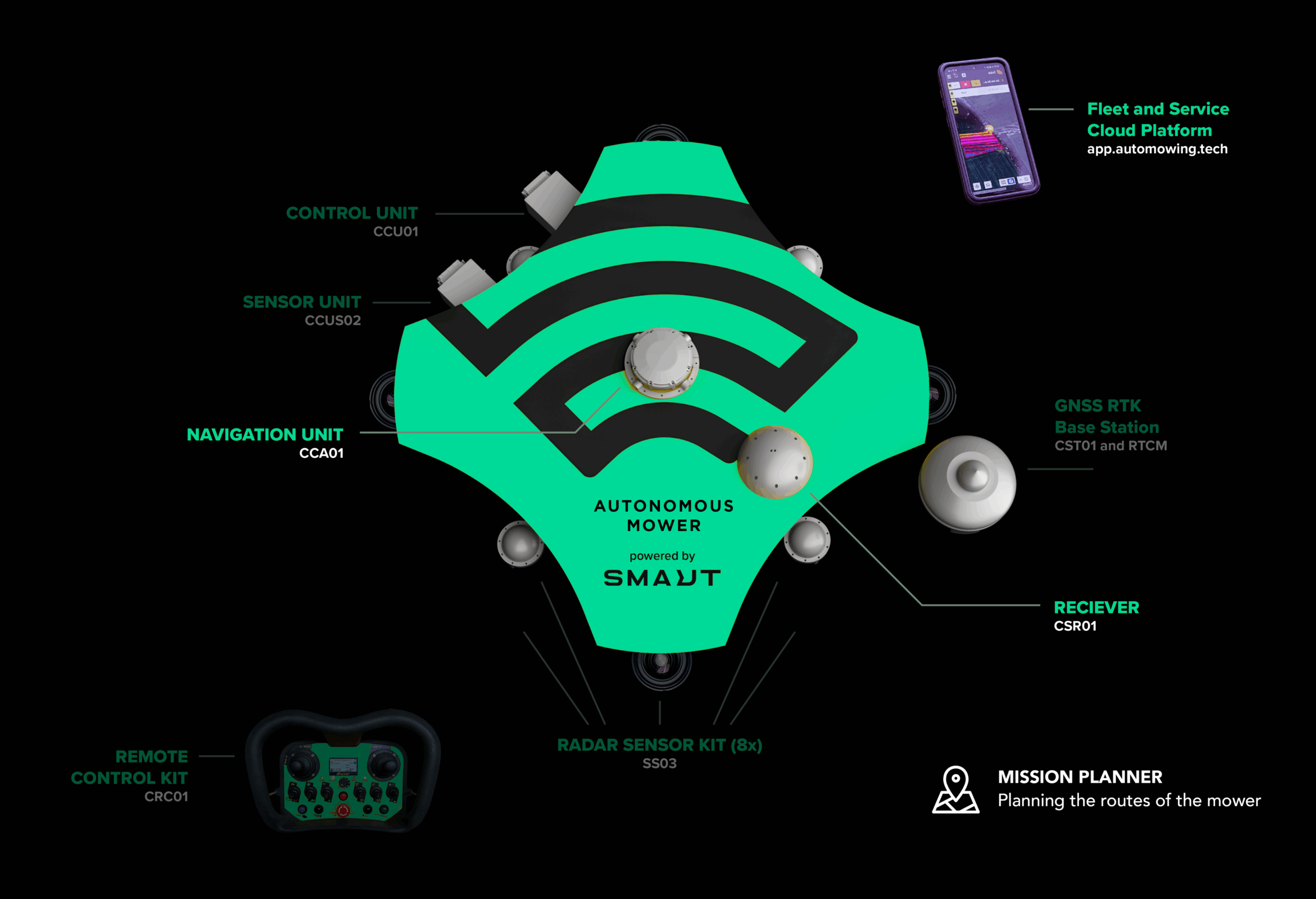
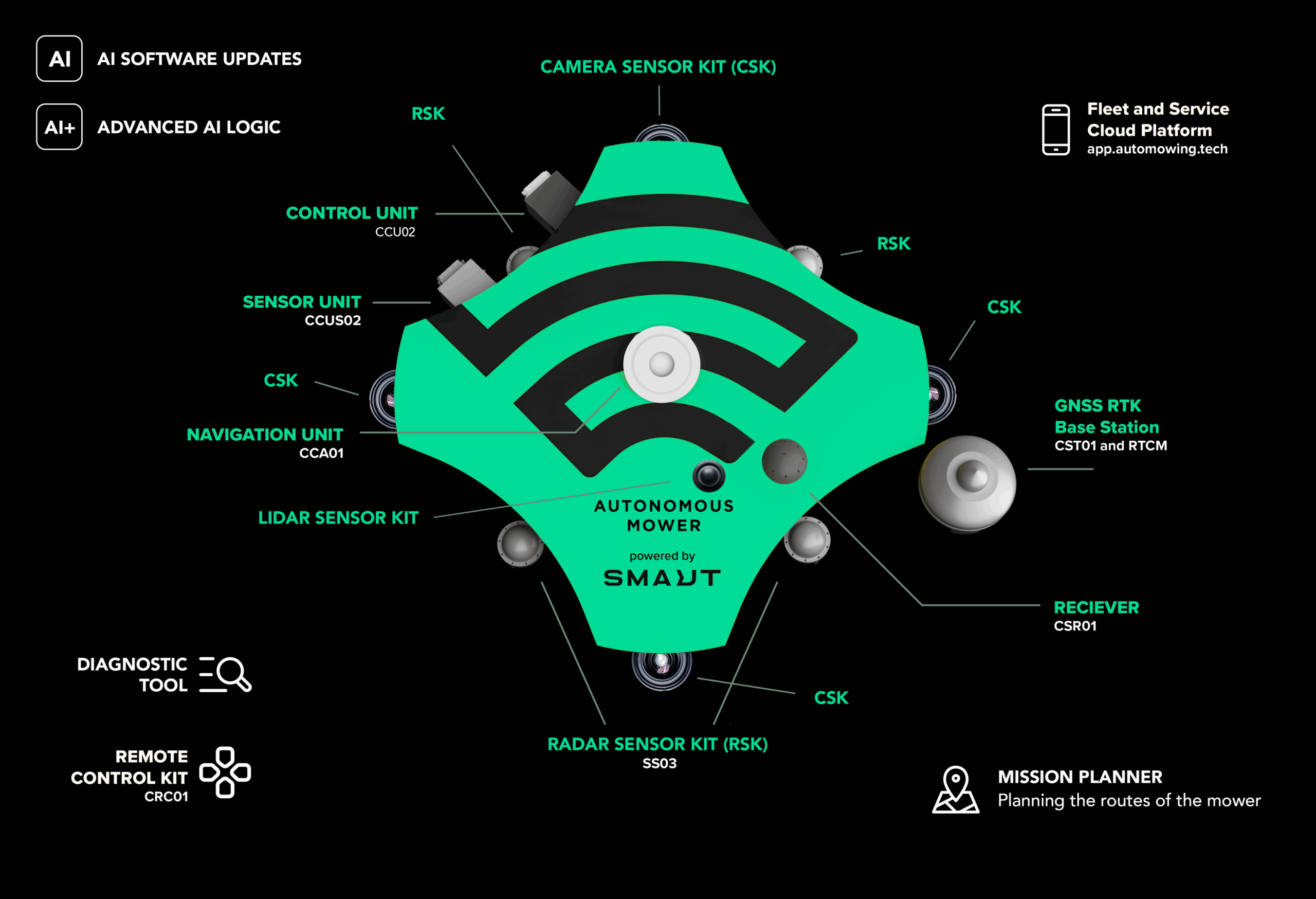
Hardware: Control Unit, GNSS RTK, Navigation Unit, Receiver, Portal, Sensor Unit, Radar Unit, Lidar Radar Kit, Camera Sensor Kit
Optional: Remote Control Kit
Adds: Advanced AI-driven software logic

Functionality: Autonomous path planning, decision-making, and recovery

Notes: Enables high-level autonomy and efficient operation in complex, unstructured environments