Hasta 70 % siega más eficaz
Hasta 65 % menores costes de explotación
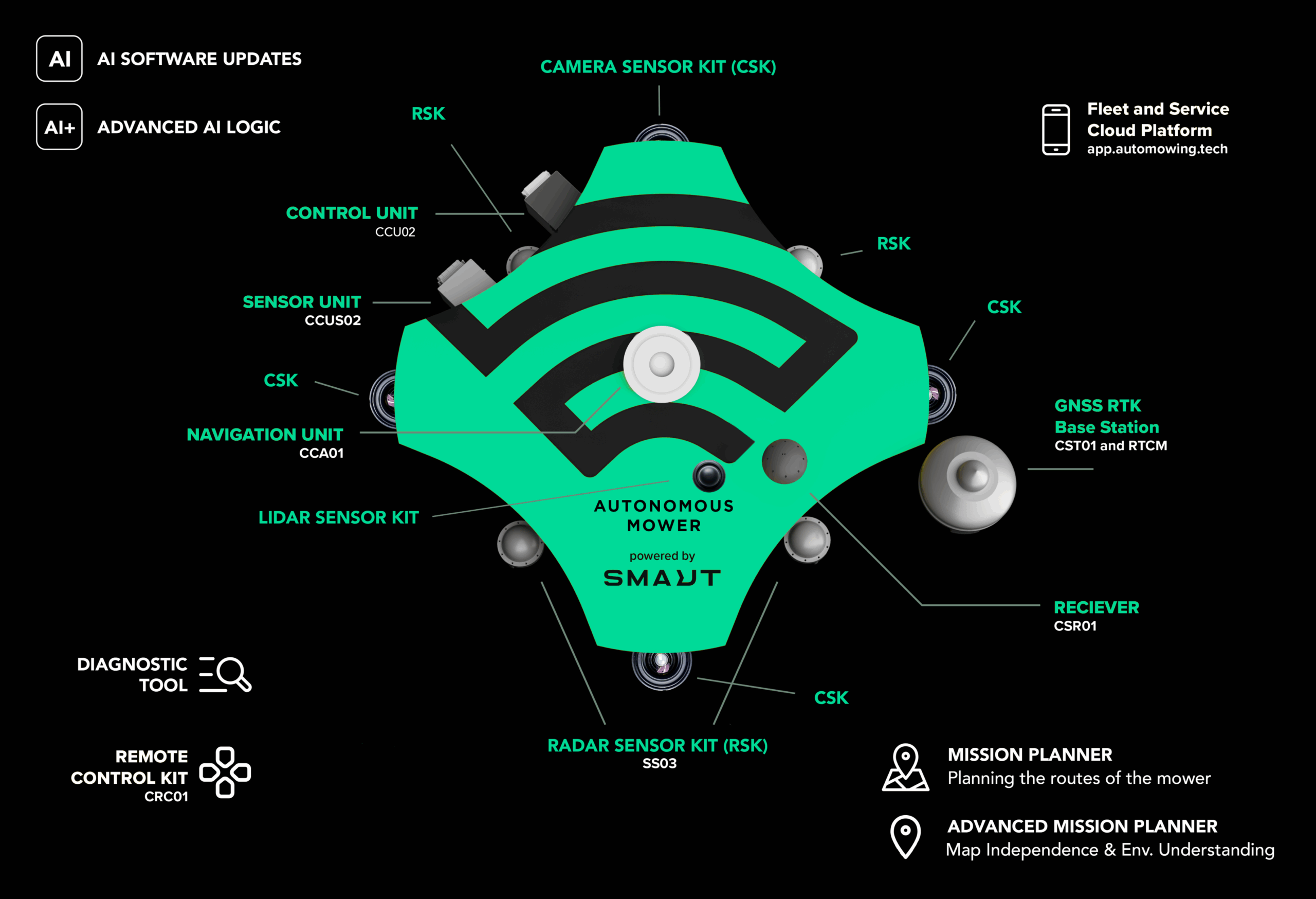
Nivel 3 - Autonomía ampliada
En este nivel, las máquinas alcanzan una autonomía casi total y operan de forma independiente, adaptándose al terreno y a los obstáculos en entornos abiertos sin preparación previa. Con sensores avanzados, algoritmos basados en IA y procesamiento de datos en tiempo real, el sistema puede navegar por paisajes complejos, evitar peligros y completar tareas de forma eficiente sin intervención humana.
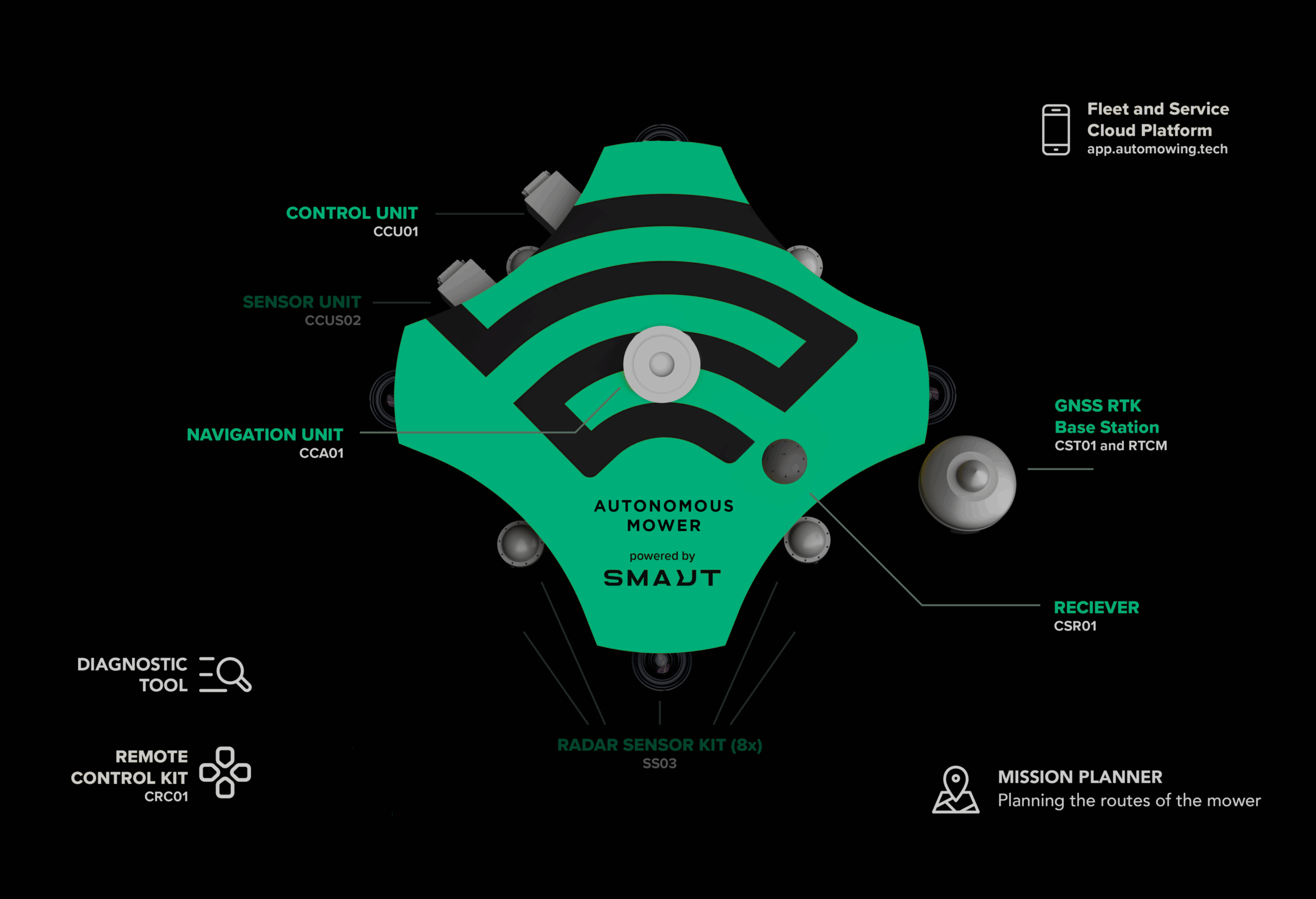
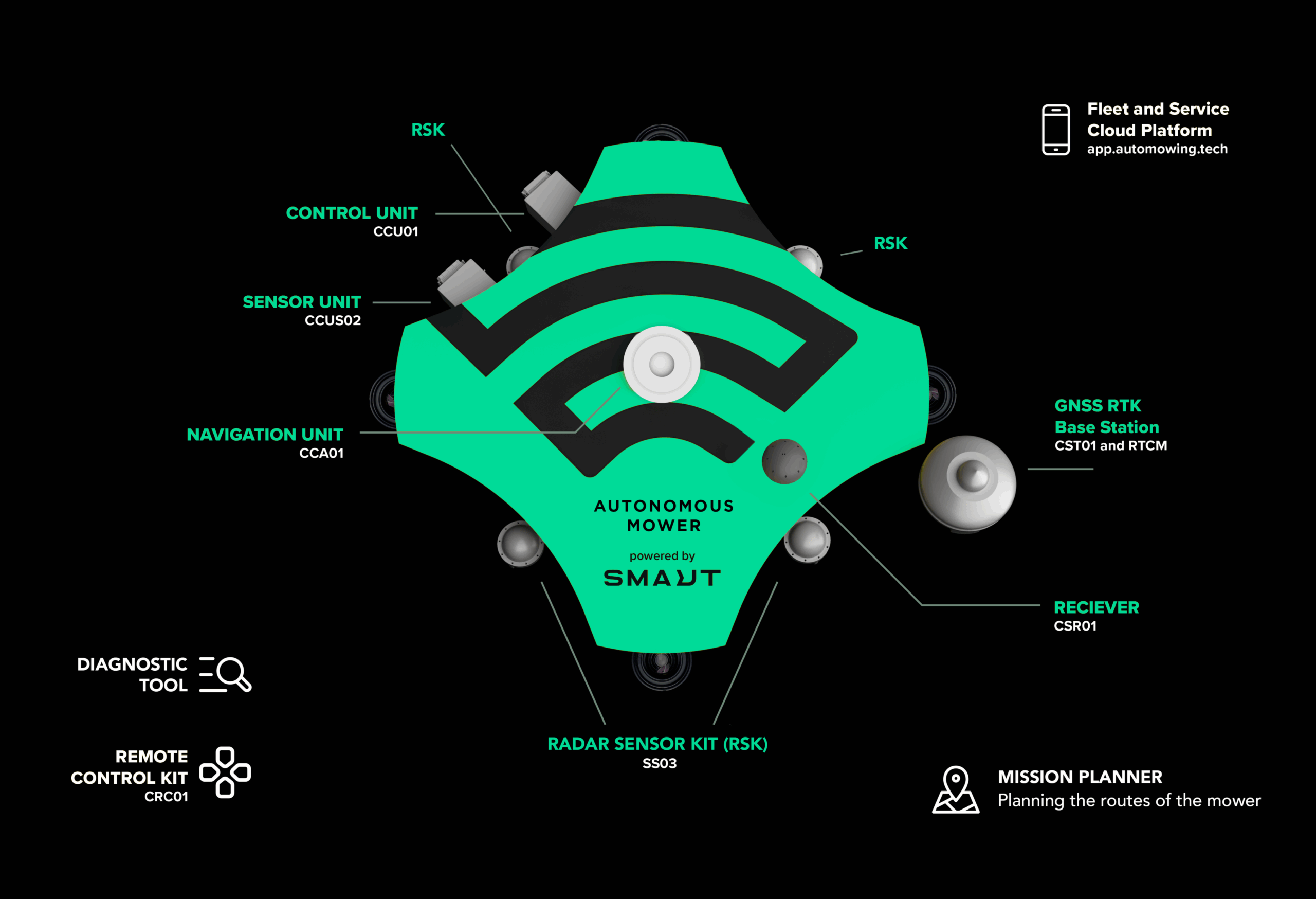
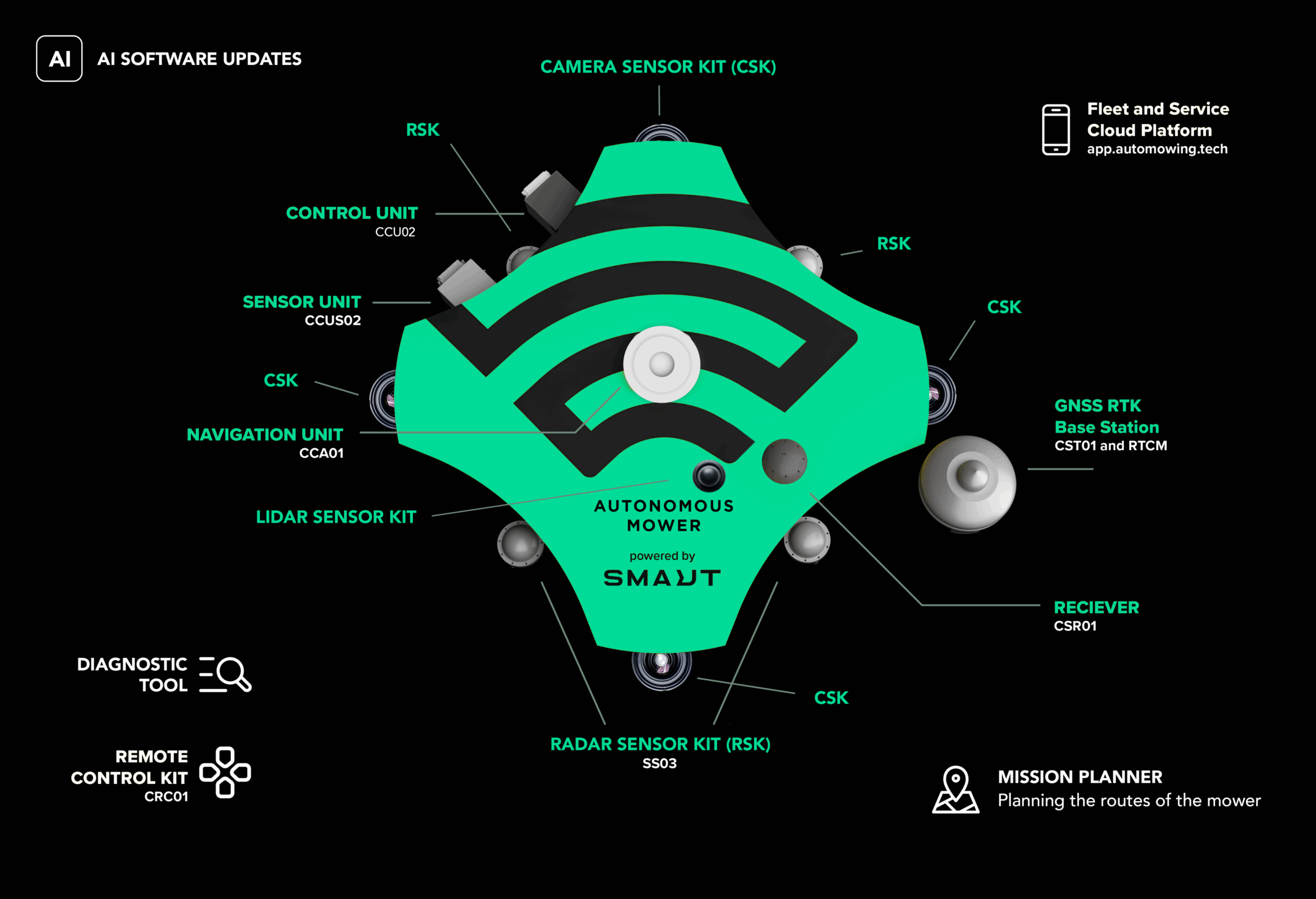
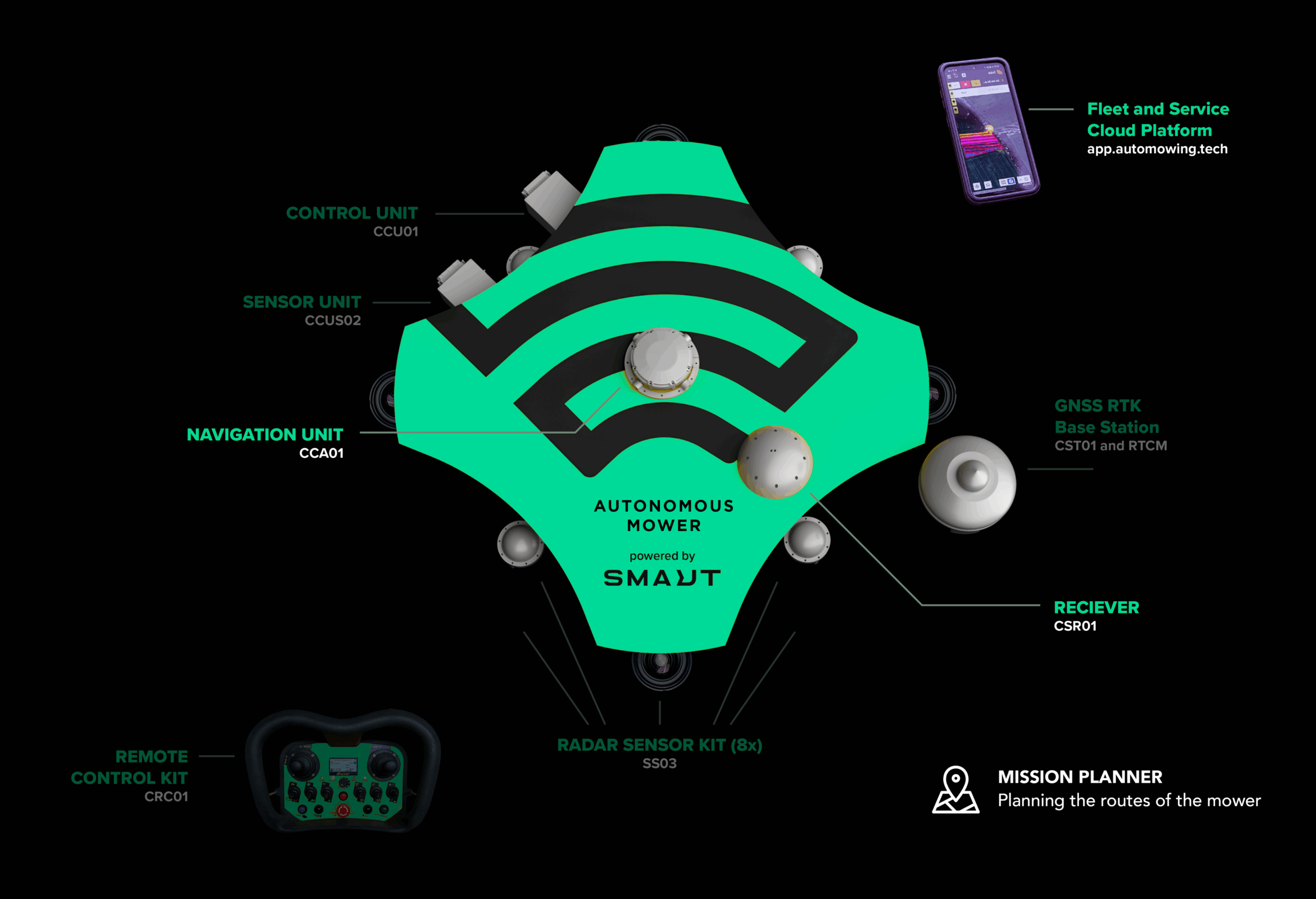
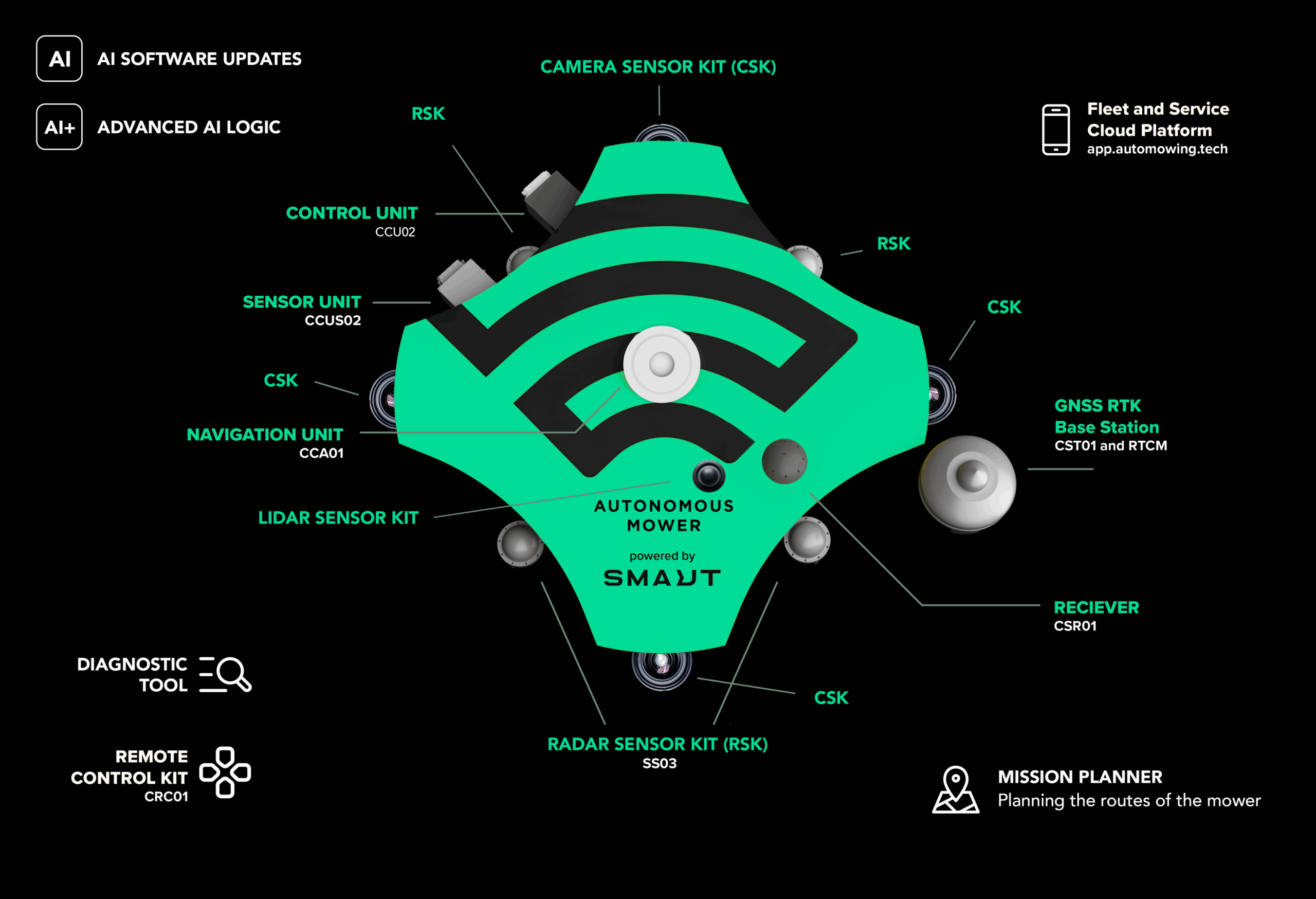
Hardware: Unidad de control, GNSS RTK, unidad de navegación, receptor, portal, unidad de sensor, unidad de radar, kit de radar Lidar, kit de sensor de cámara
Opcional: Kit de control remoto
Añade: Lógica de software avanzada basada en IA

Funcionalidad: Planificación autónoma de la trayectoria, toma de decisiones y recuperación

Notas: Permite una autonomía de alto nivel y un funcionamiento eficaz en entornos complejos y desestructurados.