Bis zu 30 % weiter effizientes Mähen
Bis zu 38 % geringere Betreiberkosten
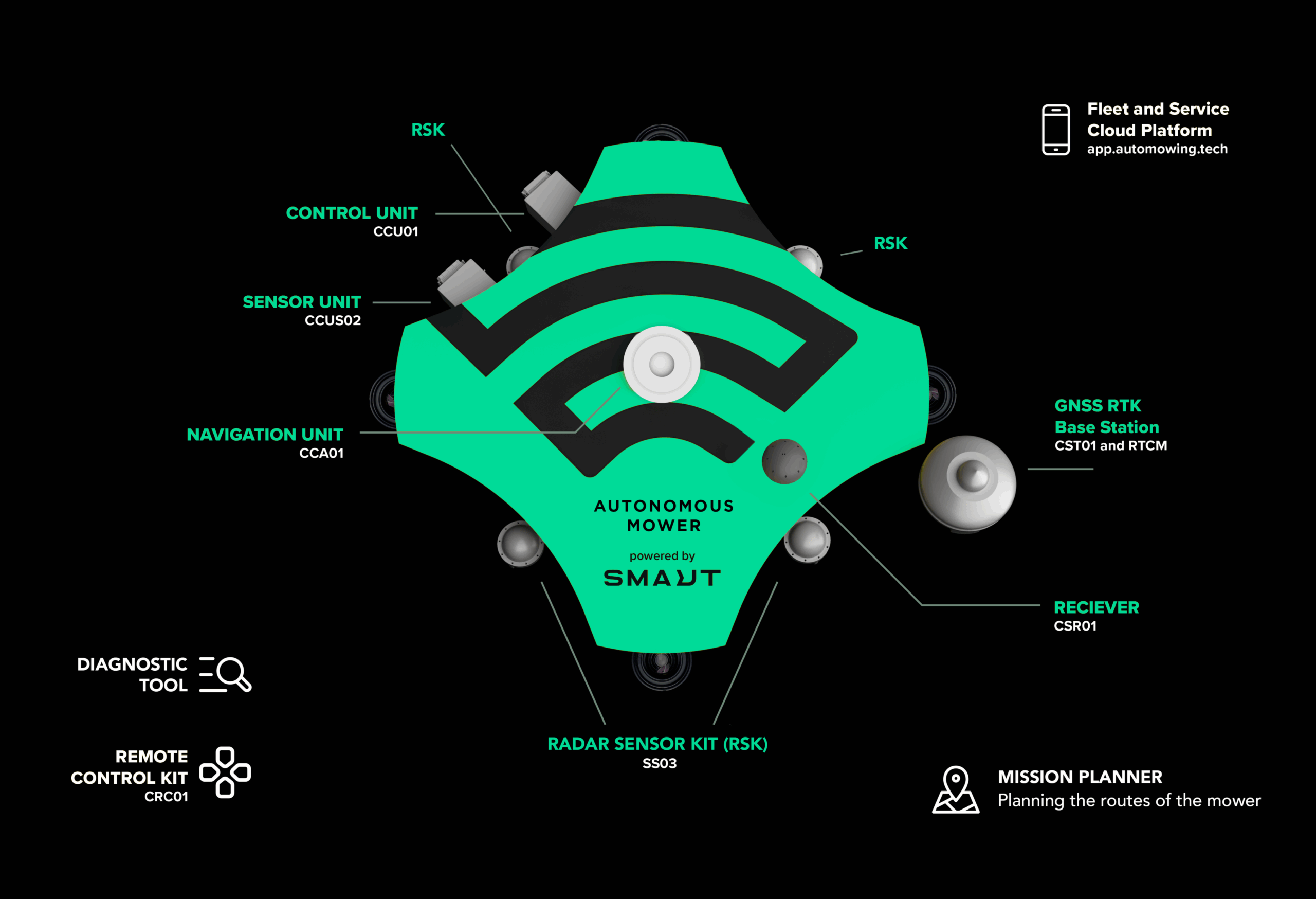
Stufe 0 - Grundlegende GPS-gestützte Autonomie
Auf dieser grundlegenden Ebene folgt die Maschine einer im Voraus geplanten Route unter Verwendung von GPS- und RTK-Signalen und ist nicht in der Lage, sich an unerwartete Ereignisse oder Veränderungen in ihrer Umgebung anzupassen oder darauf zu reagieren. Das System führt die Anweisungen präzise aus, verfügt aber nicht über ein Echtzeit-Bewusstsein oder eine Entscheidungsfindung, was es vollständig von der anfänglichen Programmierung und einem stabilen Satellitensignal abhängig macht.
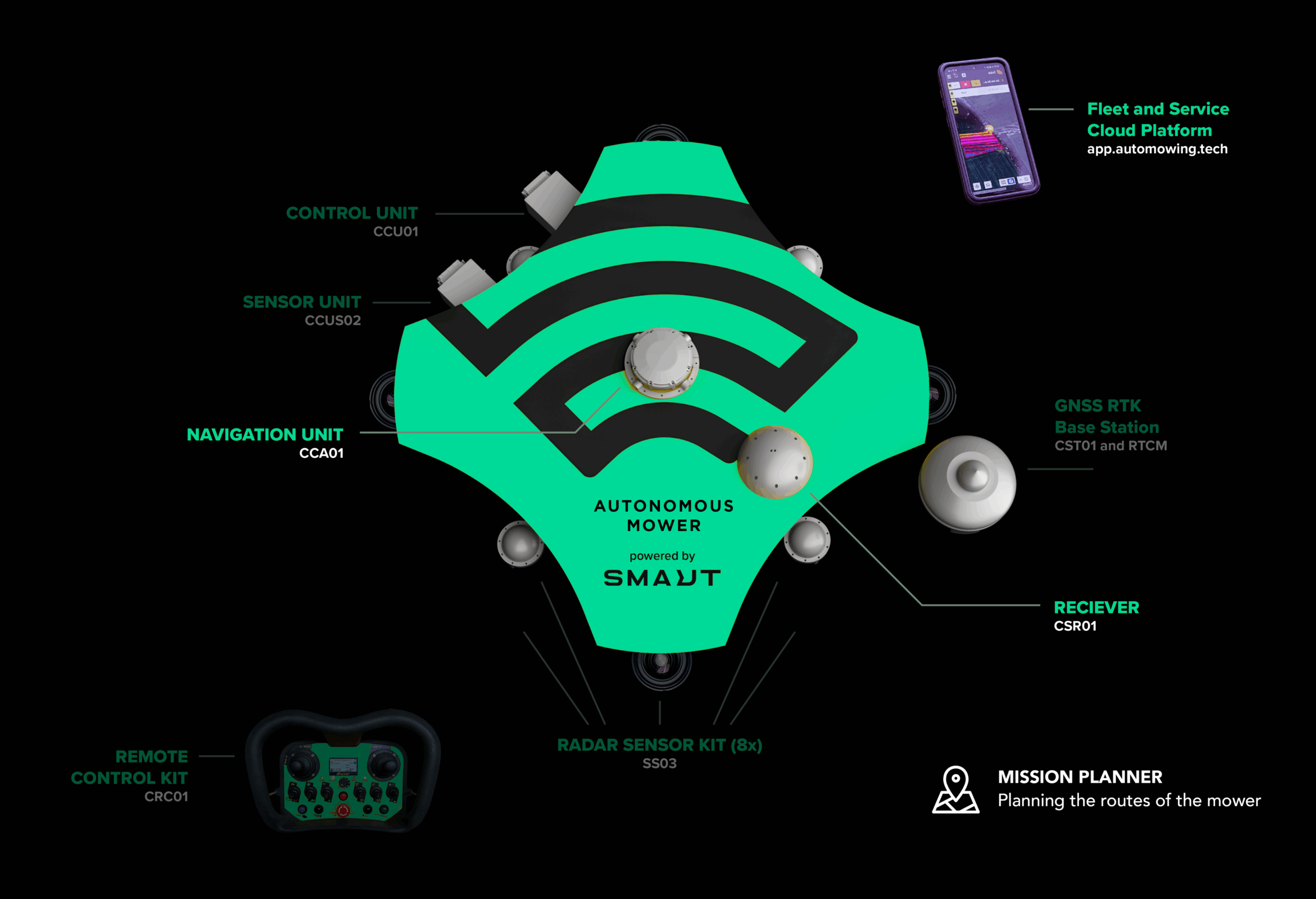
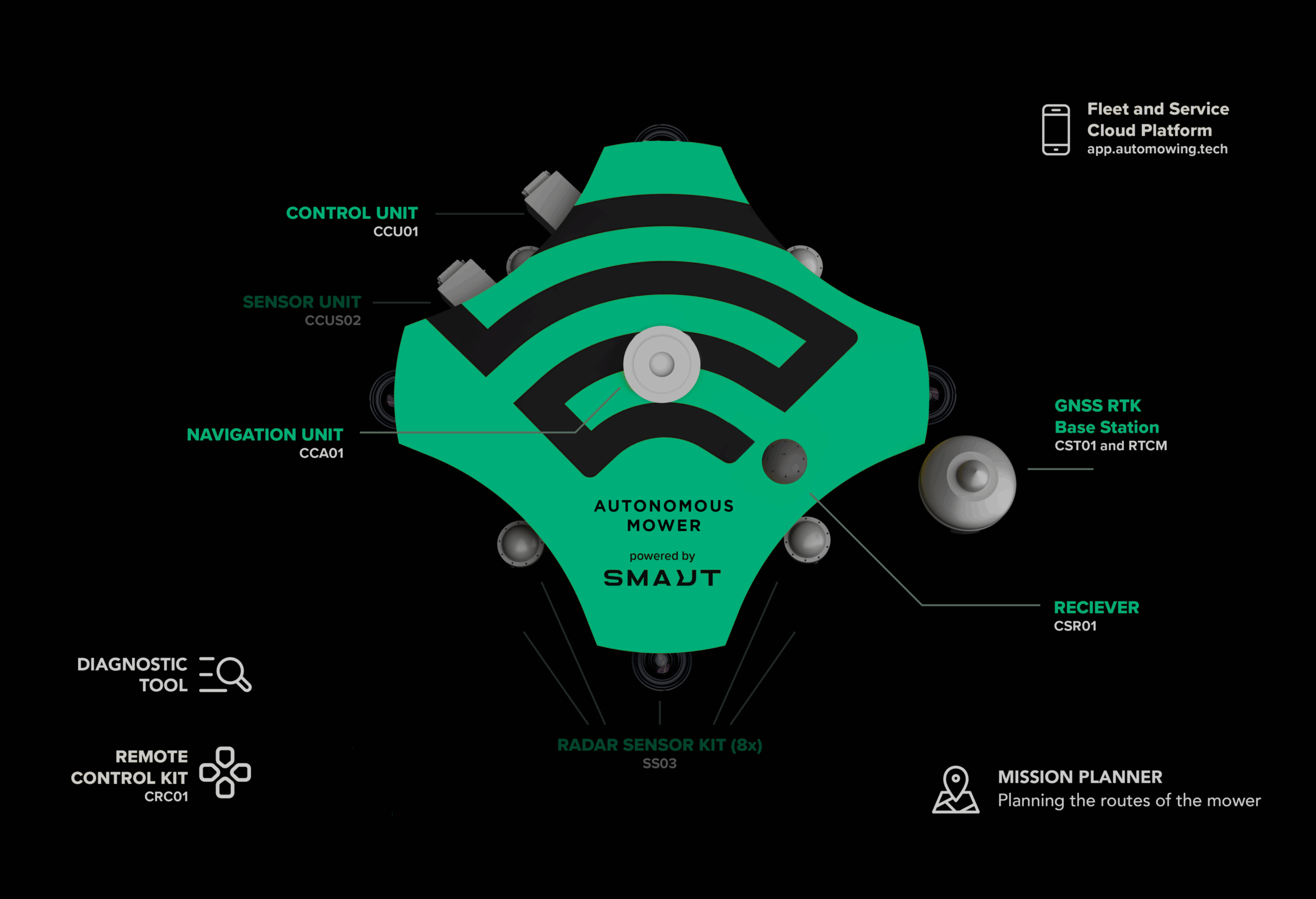
Hardware: Steuereinheit, GNSS RTK, Navigationseinheit, Empfänger, Porta
Navigationsgerät, Empfänger, Portal

Funktionsweise: Folgt vorgeplanten GPS-Routen, keine Anpassung an die Umgebung

Anmerkungen: Erfordert GPS-Abdeckung; keine über die Routenwiedergabe hinausgehende Autonomie